

स्वायत्त ड्राइभिङ मा कार क्यामेरा को आवेदन
प्रविधिको विकाससँगै, आधुनिक समाजमा स्वायत्त ड्राइभिङ बिस्तारै अपरिहार्य प्रवृत्ति भएको छ। स्वायत्त ड्राइभिङले ट्राफिक सुरक्षा मात्र सुधार गर्न सक्दैन, तर प्रभावकारी रूपमा ट्राफिक भीड कम गर्न र ऊर्जा बचत गर्न सक्छ।
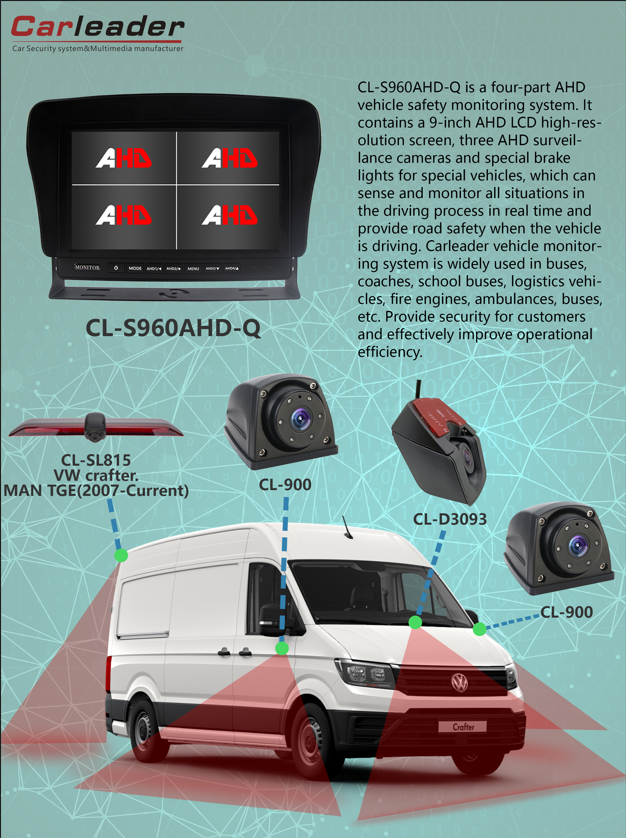
इन-कार क्यामेराहरू सेल्फ-ड्राइभिङ कारको मुख्य भिजुअल सेन्सर हो, र यो परिपक्व प्रविधिको साथ "कारको आँखा" पनि हो। रियर भ्यू कार क्यामेराहरूले छवि जानकारी प्राप्त गर्न, लेन्सद्वारा छवि सङ्कलन गरेपछि, क्यामेरामा रहेको फोटोसेन्सिटिभ कम्पोनेन्ट सर्किट र कन्ट्रोल कम्पोनेन्टले छविलाई प्रशोधन गर्छ र कम्प्युटरद्वारा प्रशोधन गर्न सकिने डिजिटल सिग्नलमा रूपान्तरण गर्छ। छवि जानकारी एल्गोरिदम मार्फत भिजन प्रोसेसिंग चिपमा प्रशोधन गरिन्छ प्रभावकारी जानकारी निकालेपछि, यो निर्णय लिने र निर्णयको लागि निर्णय गर्ने तहमा प्रवेश गर्दछ, ताकि वाहन वरपरको सडक अवस्थाहरू बुझ्न र न्याय गर्न सकिन्छ। सवारी साधनमा राखिएका क्यामेरामा लक्ष्य चिन्न सक्ने क्षमता हुन्छ। छवि पहिचान टेक्नोलोजी प्रयोग गरेर, सेल्फ-ड्राइभिङ कारहरूले पैदल यात्रीहरू, सवारी साधनहरू, ट्राफिक संकेतहरू र ड्राइभिङको क्रममा अवरोधहरू सही रूपमा छुट्याउन सक्छन्। हाल, तिनीहरू मुख्यतया 360 पानोरामिक छविहरू, अगाडि टक्कर चेतावनीहरू, र लेन प्रस्थान चेतावनीहरूमा प्रयोग गरिन्छ। र पैदल यात्री पत्ता लगाउने र अन्य ADAS कार्यहरू।
सेल्फ ड्राइभिङ कार क्यामेराले मुख्यतया दुई भागहरू समावेश गर्दछ: सफ्टवेयर र हार्डवेयर। हार्डवेयर संरचनाको परिप्रेक्ष्यमा, कार क्यामेराका मुख्य भागहरूमा लेन्स, CMOS छवि सेन्सर, DSP डिजिटल प्रोसेसिङ चिप, आदि समावेश छन्।
र समग्र कम्पोनेन्टहरू मोड्युलहरू मार्फत भेला हुन्छन्।
स्थापना स्थिति अनुसार, कार क्यामेराहरू अगाडि दृश्य, साइड भ्यू, रियर भ्यू, बिल्ट-इन र वरपर दृश्य, आदिमा विभाजन गर्न सकिन्छ।
यसको भूमिका निम्नानुसार छ:
फ्रन्ट-दृश्य क्यामेरा: सामान्यतया ADAS/स्वायत्त ड्राइभिङमा मुख्य क्यामेराको रूपमा प्रयोग गरिन्छ, कारको अगाडिको विन्डशिल्ड माथि स्थापित हुन्छ, यसले अवरोधहरू, लेन लाइनहरू, कर्बहरू, ट्राफिक लाइटहरू, ट्राफिक संकेतहरू र ड्राइभ योग्य क्षेत्रहरू पत्ता लगाउन सक्छ। पहिचान।
साइड भ्यू क्यामेरा: साइड भ्यू क्यामेराहरूमा सामान्यतया तीनवटा स्थापना स्थानहरू हुन्छन्, रियरभ्यू मिरर, गाडीको बी-पिलर र गाडीको रियर फेन्डर, सामान्यतया साइड बाधा अनुगमन, ब्लाइन्ड स्पट निगरानी, आदिका लागि प्रयोग गरिन्छ।
⢠पछाडि दृश्य क्यामेरा: सामान्यतया गाडीको ट्रंकमा स्थापित, यो पार्किङ सहायता प्रकार्य महसुस गर्न प्रयोग गर्न सकिन्छ।
वरिपरि दृश्य क्यामेरा: वरिपरि दृश्य क्यामेराहरू सामान्यतया सवारी साधनको वरिपरि स्थापना गरिन्छ, र सामान्यतया 4 देखि 8 फिशआई क्यामेराहरू 360 पानोरामिक छविहरू, पार्किङ ठाउँ अनुगमन, र कम-गति धारणा कार्यहरू महसुस गर्न प्रयोग गरिन्छ।
बिल्ट-इन क्यामेरा: सामान्य स्थापना स्थानहरूमा गाडीको ए-पिलरको भित्री भाग, स्टेयरिङ ह्वीलमा, र कारमा घरपालुवा जनावर र बच्चाहरूलाई निगरानी गर्ने, र चालकको थकानलाई निगरानी गर्ने जस्ता कार्यहरूका लागि रियरभ्यू मिरर समावेश हुन्छ।
सोधपुछ पठाउनुहोस्


X
हामी तपाईंलाई राम्रो ब्राउजिङ अनुभव प्रदान गर्न, साइट ट्राफिक विश्लेषण र सामग्री निजीकृत गर्न कुकीहरू प्रयोग गर्छौं। यो साइट प्रयोग गरेर, तपाईं कुकीहरूको हाम्रो प्रयोगमा सहमत हुनुहुन्छ।
गोपनीयता नीति